クイックスタート
前提条件
- Miniconda: お使いの OS に Miniconda をダウンロードしてインストールします。
インストール
-
Winderリポジトリをクローンします:git clone https://github.com/aotenjo-xyz/winder.gitcd winder -
新しい conda 環境を作成し、必要な依存関係をインストールします:
conda env create -f environment.yml -
conda 環境を有効化し、
PYTHONPATH環境変数を現在のディレクトリに設定します:conda activate windingexport PYTHONPATH=$PWD -
設定ファイルを作成します。
settings.yml.exampleをsettings.ymlにコピーします。cp settings-example.yml settings.yml
マシンの電源を入れる
巻線機の電源を入れ、PC に接続します。
すべてのモーターは自動でキャリブレーションを実行し、ゼロ位置に移動します。
calib.py でモーターを動かす
キャリブレーションスクリプトを実行してモーターを動かします:
python scripts/calib.py
キャリブレーションコンソールでは、モーター番号と目標位置を入力して各モーターを手動で動かせます。
例:
01を入力すると M0 が 1.0 に移動2-0.4を入力すると M2 が -0.4 に移動

モーター方向を確認する
各モーター軸の磁石の向きによっては、角度の符号が逆になる場合があります。
パラメータを調整する前に、モーター方向を確認し、settings.yml の各モーターの direction 値を正しく設定してください。
-
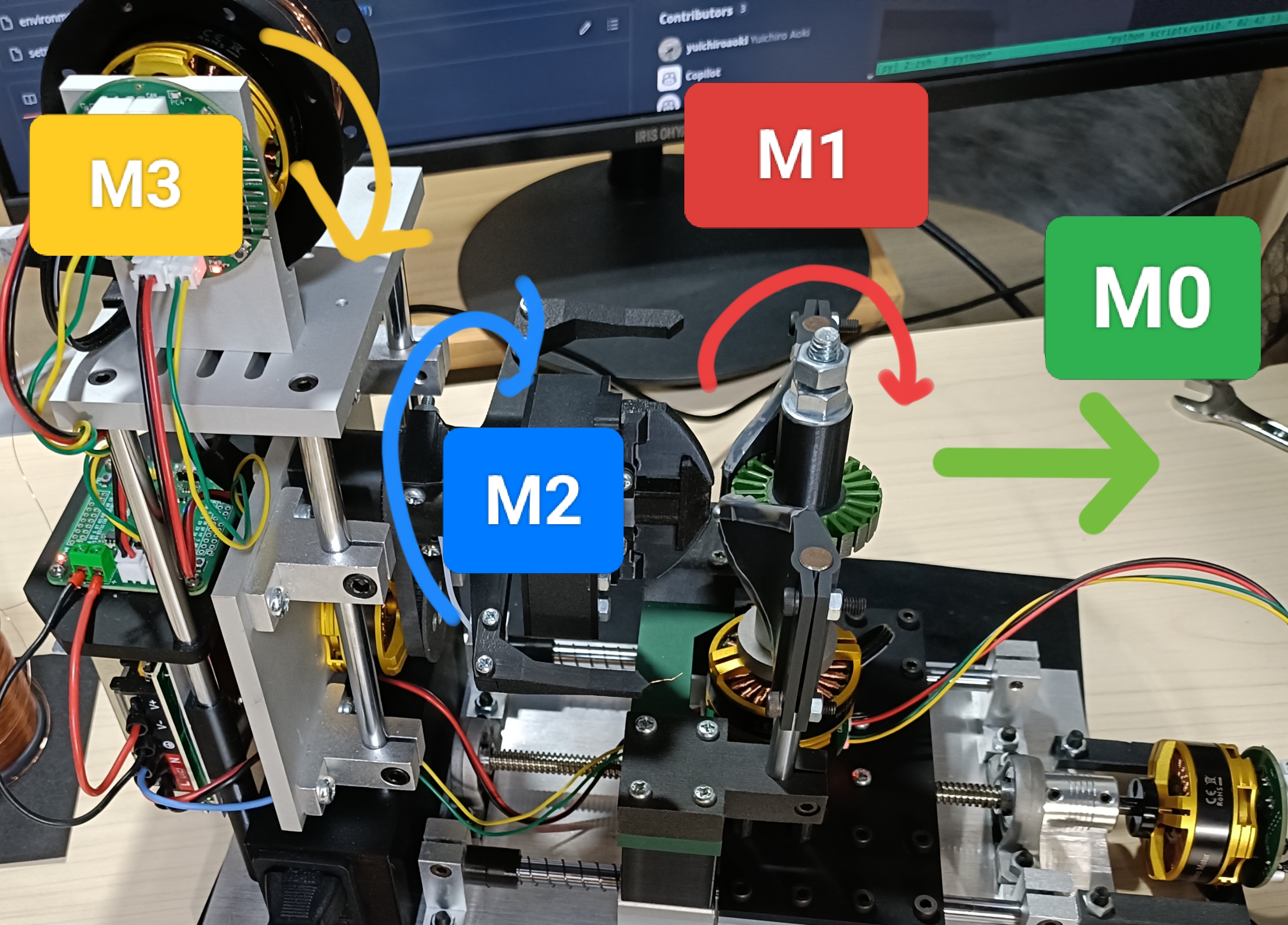
M0 の方向確認:
calib.pyで M0 を 0 から 1.0 に動かします。- M0 ユニットが画像の緑矢印と同じ方向に動く場合は
direction: true。 - 逆方向に動く場合は
direction: false。
- M0 ユニットが画像の緑矢印と同じ方向に動く場合は
-
M1 と M2 の方向確認:
calib.pyで M1 と M2 を 0 から 1.0 に動かします。- M1/M2 ユニットが画像の矢印と同じ方向に動く場合は
direction: true。 - 逆方向に動く場合は
direction: false。
- M1/M2 ユニットが画像の矢印と同じ方向に動く場合は
-
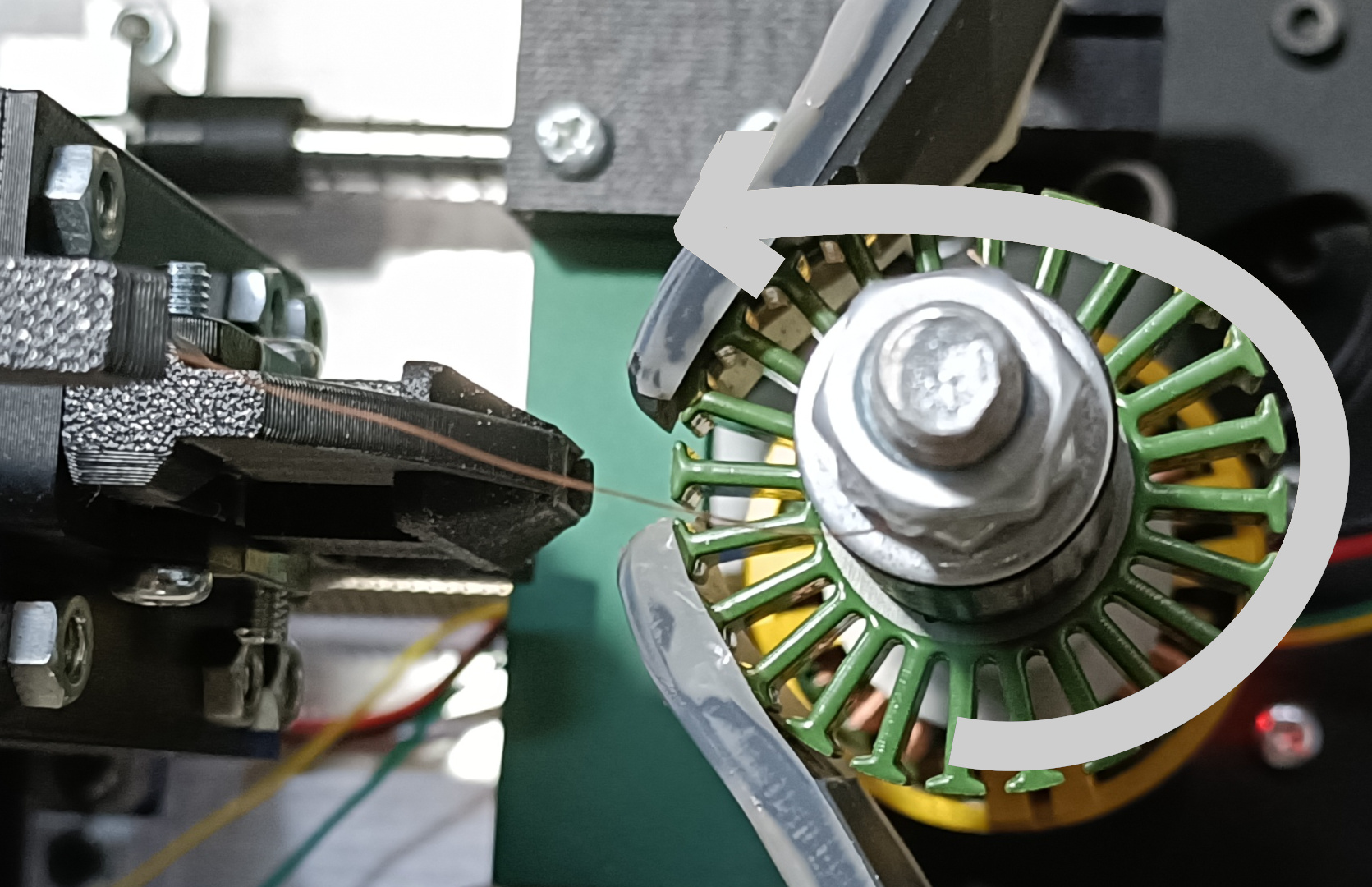
M3 の方向確認:
M3 モーターをしっかり保持し、少しだけ電圧をかけます (0 -> 0.05)。- スプールが画像と同じ方向に回る場合は
direction: true。 - 逆方向に回る場合は
direction: false。
- スプールが画像と同じ方向に回る場合は
パラメータをキャリブレーションする
M2 のキャリブレーション
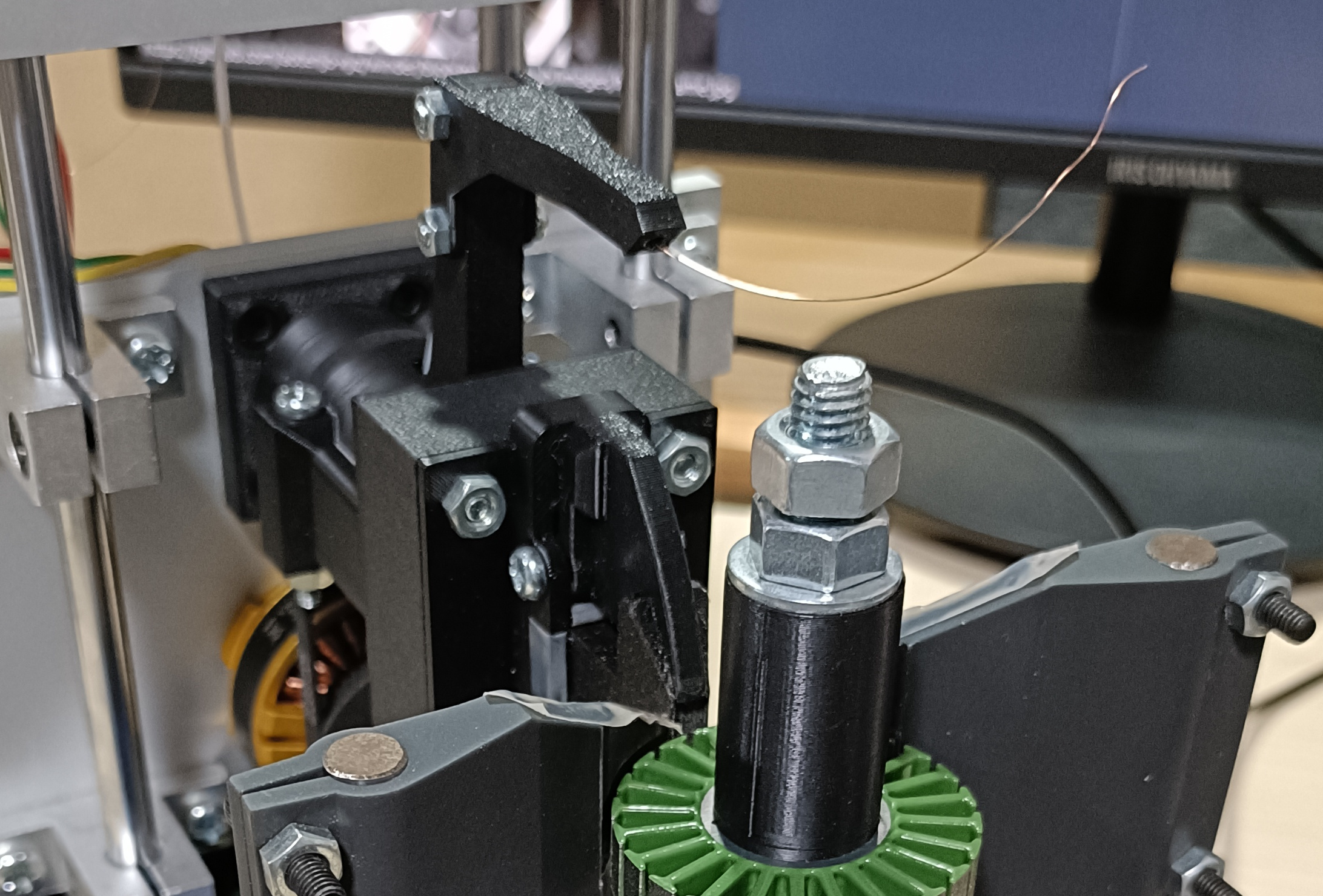
以下の画像のようにアームが 12 時方向にあるときの M2 の位置を探し、settings.yml の M2 の zero に設定します。
M1 のキャリブレーション
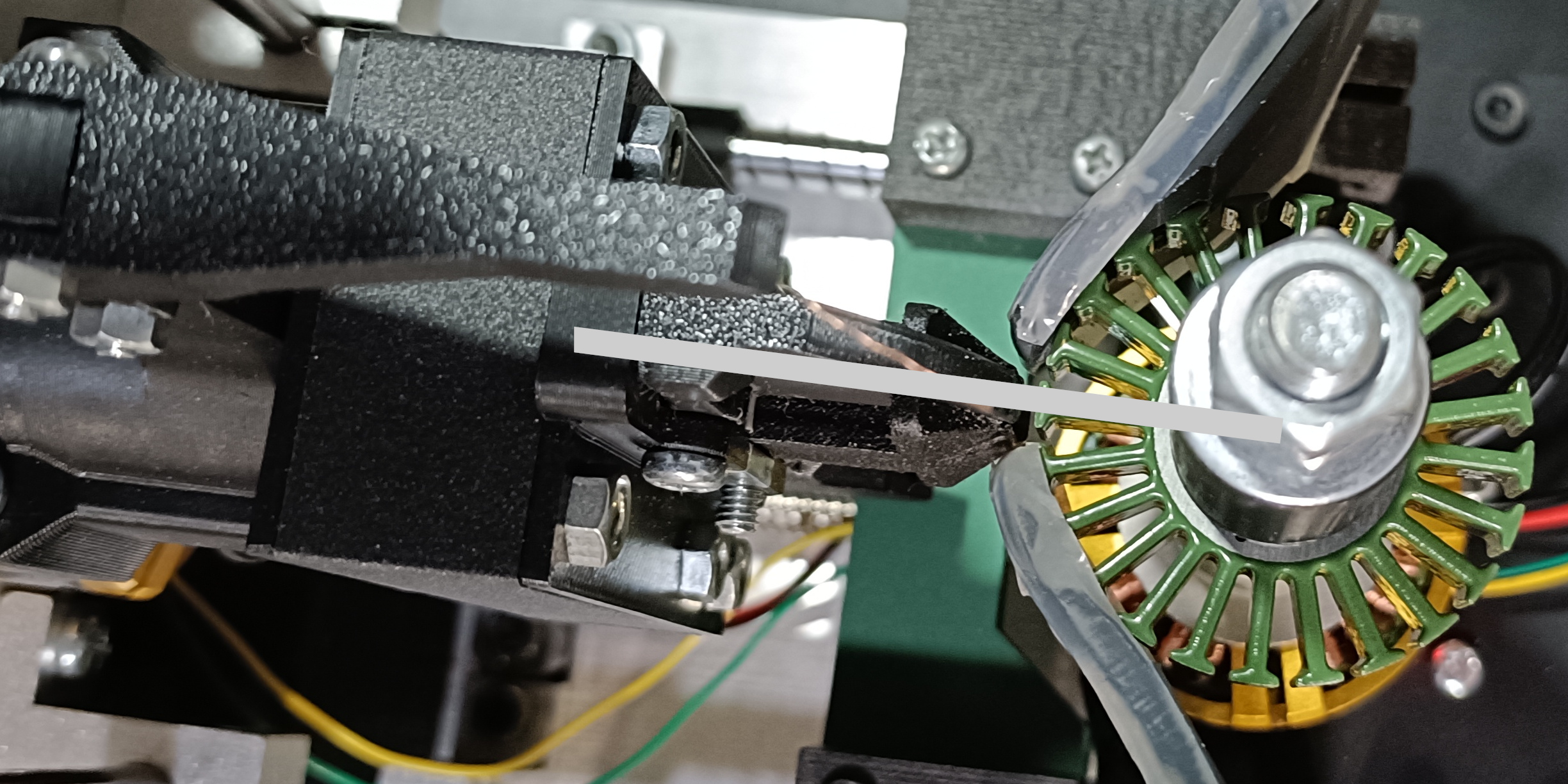
以下の画像のようにステーターがステーターホルダーと完全に揃うときの M1 の位置を探し、settings.yml の M1 の zero に設定します。
マシンは揃っている歯から巻き始めるため、最初に巻きたい歯を選んでステーターホルダーに合わせてください。
M0 のキャリブレーション
wind_range_end
-
M1 モーターを
zero位置に移動します。 -
以下の画像のように、ステーターホルダーが最初の歯の先端に触れる位置まで M0 を動かし、
settings.ymlの M0 のwind_range_endに設定します。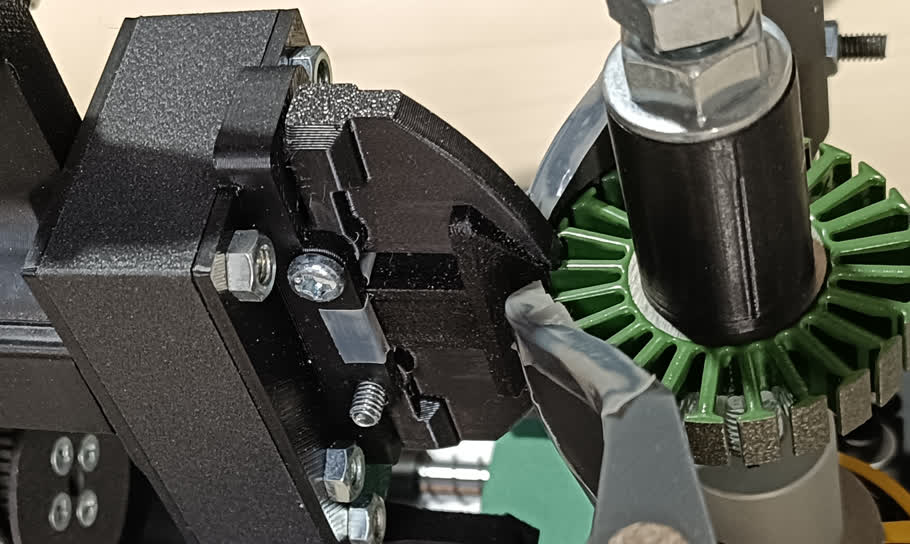
wind_range_start
-
以下の画像のように M0 をさらに移動し、
settings.ymlの M0 のwind_range_startに設定します。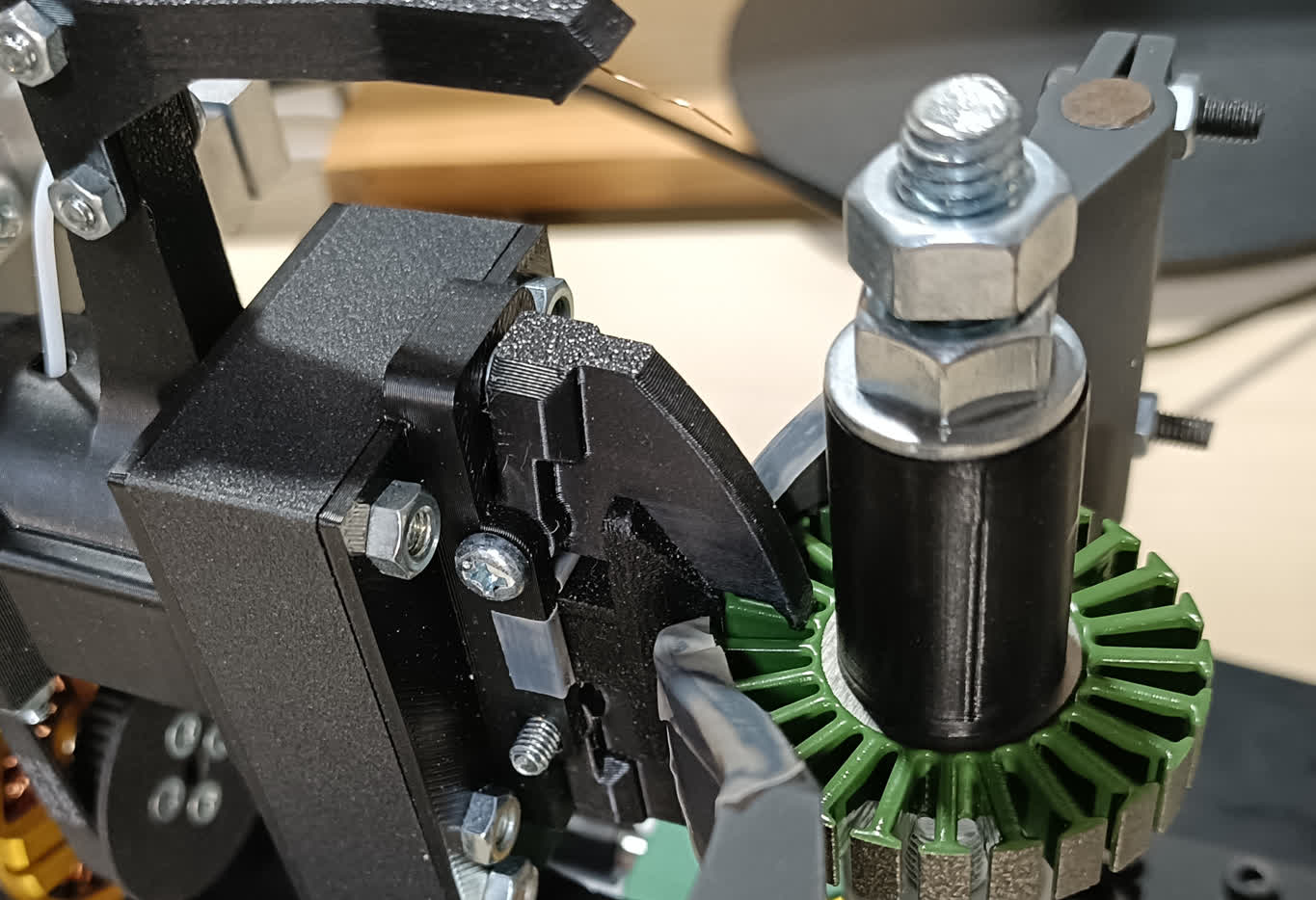
巻線設定を変更する
turns
巻数を settings.yml の turns に設定します。
winding_config
モーターに合わせて winding_config を変更します。巻線構成の詳細は Winding Configuration を参照してください。
巻線スクリプトを実行する
-
キャリブレーション完了後、巻線スクリプトを実行します:
python scripts/main.py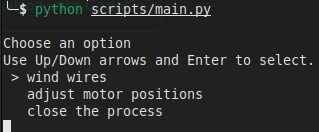
-
adjust motor positions->Initialize the motor positionsを選択して、モーターを初期位置に移動します。 -
メインメニューに戻り、
wire wires->wind wire 0を選択して巻線を開始します。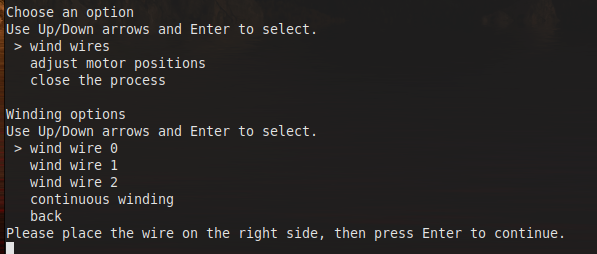
-
指示に従って上部のナットを締め、ワイヤーを固定します。
プロンプトに "Please place the wire on the right side..." と表示されたら、以下のようにワイヤーを配置して Enter を押します。
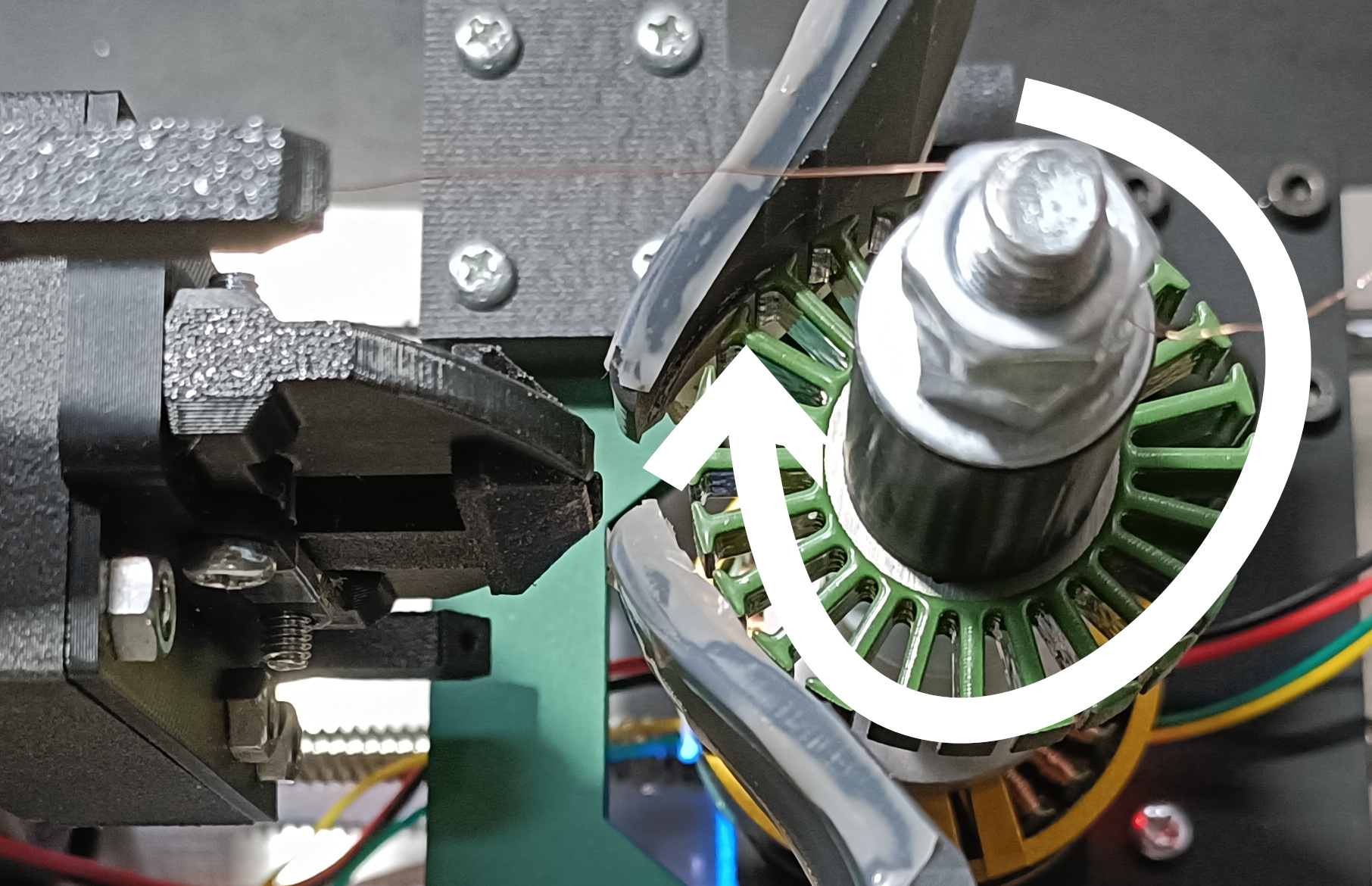
プロンプトに "Please place the wire on the left side..." と表示されたら、以下のようにワイヤーを配置して Enter を押します。
-
Enter を押して巻線を開始します。設定したパラメータに従って、自動で巻線されます。
