快速入门
先决条件
- Miniconda:下载并安装适合你操作系统的 Miniconda。
安装
-
克隆
Winder仓库:git clone https://github.com/aotenjo-xyz/winder.gitcd winder -
创建新的 conda 环境并安装所需依赖:
conda env create -f environment.yml -
激活 conda 环境,并将
PYTHONPATH环境变量设置为当前目录:conda activate windingexport PYTHONPATH=$PWD -
创建设置文件。 将
settings.yml.example复制为settings.yml。cp settings-example.yml settings.yml
给机器上电
打开绕线机电源并连接到电脑。
所有电机会自动执行校准流程并移动到零位。
使用 calib.py 移动电机
运行校准脚本来移动电机:
python scripts/calib.py
在校准控制台中,你可以输入电机编号和目标位置来手动移动每个电机。
例如:
- 输入
01,将 M0 移动到 1.0 - 输入
2-0.4,将 M2 移动到 -0.4

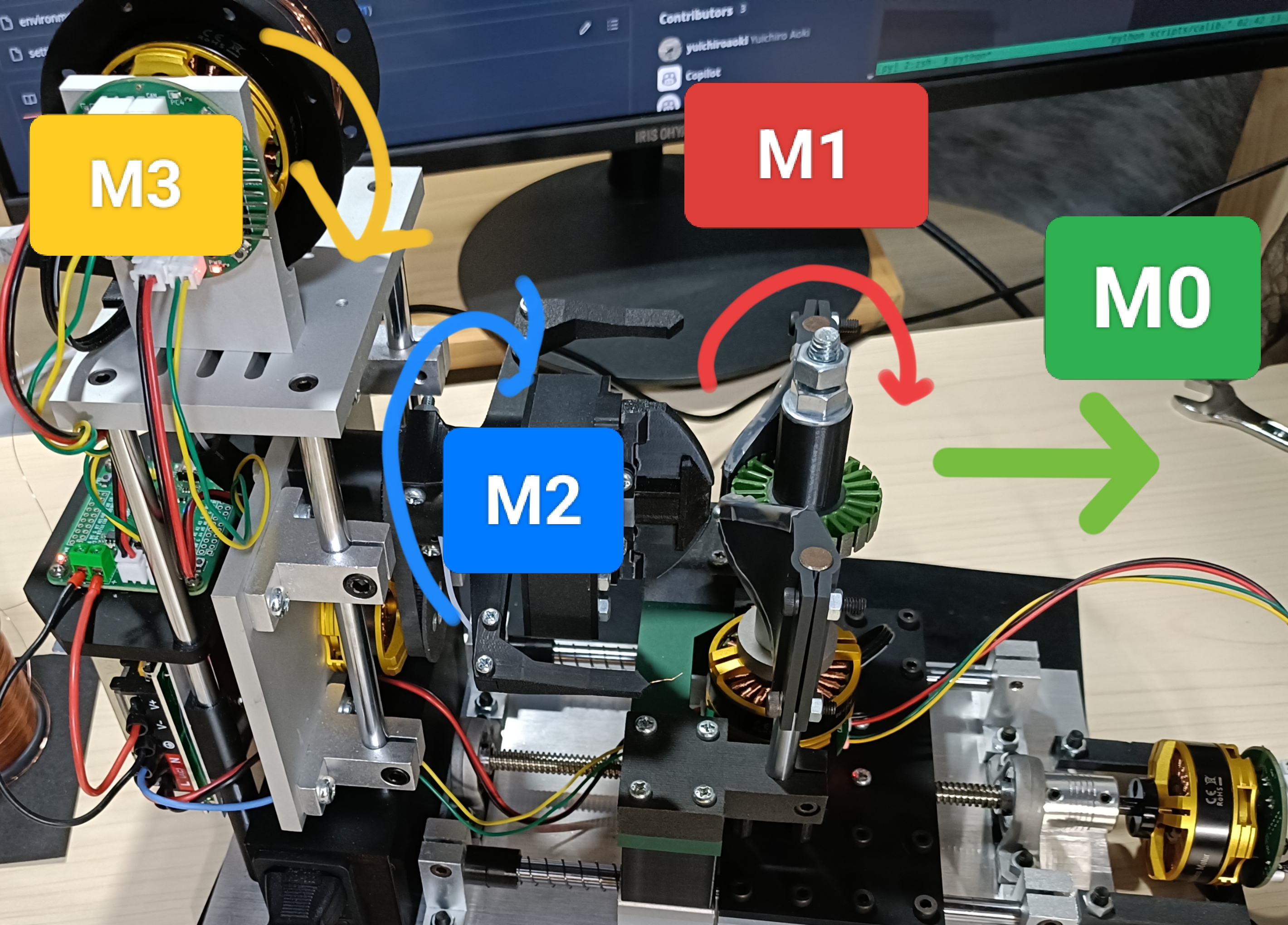
检查电机方向
由于每个电机轴上磁铁的安装方向可能不同,角度读数可能会反向。
在校准参数之前,请先确认电机方向,并在 settings.yml 中为每个电机正确设置 direction。
-
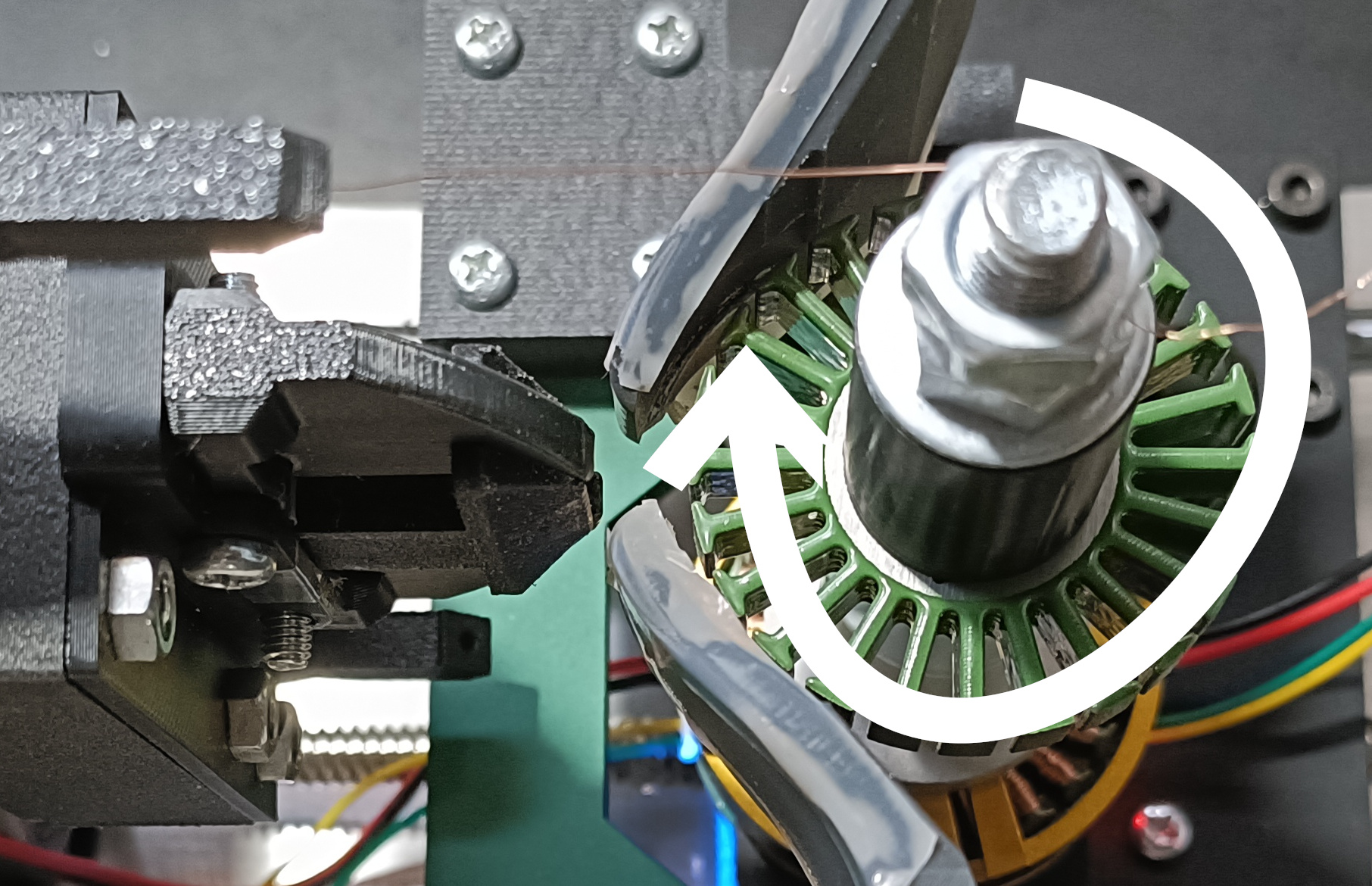
检查 M0 方向:
使用calib.py将 M0 从 0 移动到 1.0。- 如果 M0 运动方向与图中绿色箭头一致,设置
direction: true。 - 如果方向相反,设置
direction: false。
- 如果 M0 运动方向与图中绿色箭头一致,设置
-
检查 M1 和 M2 方向:
使用calib.py将 M1 和 M2 从 0 移动到 1.0。- 如果 M1/M2 运动方向与图中箭头一致,设置
direction: true。 - 如果方向相反,设置
direction: false。
- 如果 M1/M2 运动方向与图中箭头一致,设置
-
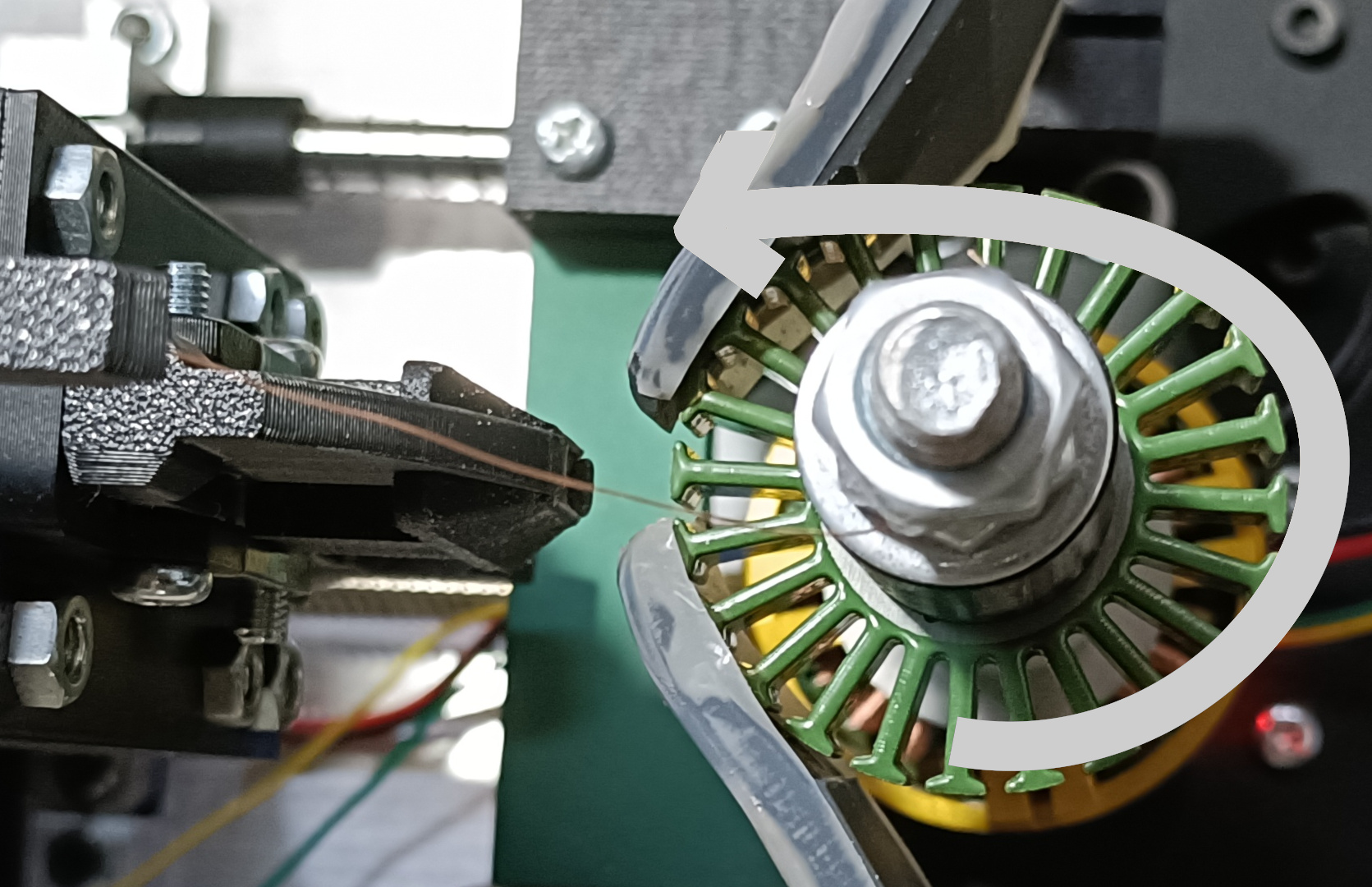
检查 M3 方向:
固定住 M3 电机,然后施加一个很小的电压(0 -> 0.05)。- 如果线轴转动方向与图中一致,设置
direction: true。 - 如果方向相反,设置
direction: false。
- 如果线轴转动方向与图中一致,设置
校准参数
M2 校准
找到 M2 在机械臂位于 12 点钟方向时的位置(如下图),并将其设置为 settings.yml 中 M2 的 zero 参数。
M1 校准
找到 M1 在定子与定子支架完全对齐时的位置(如下图),并将其设置为 settings.yml 中 M1 的 zero 参数。
机器会优先绕制当前对齐的齿位,因此请先选择希望最先绕制的齿位,并将其与定子支架对齐后再设置 M1 零位。
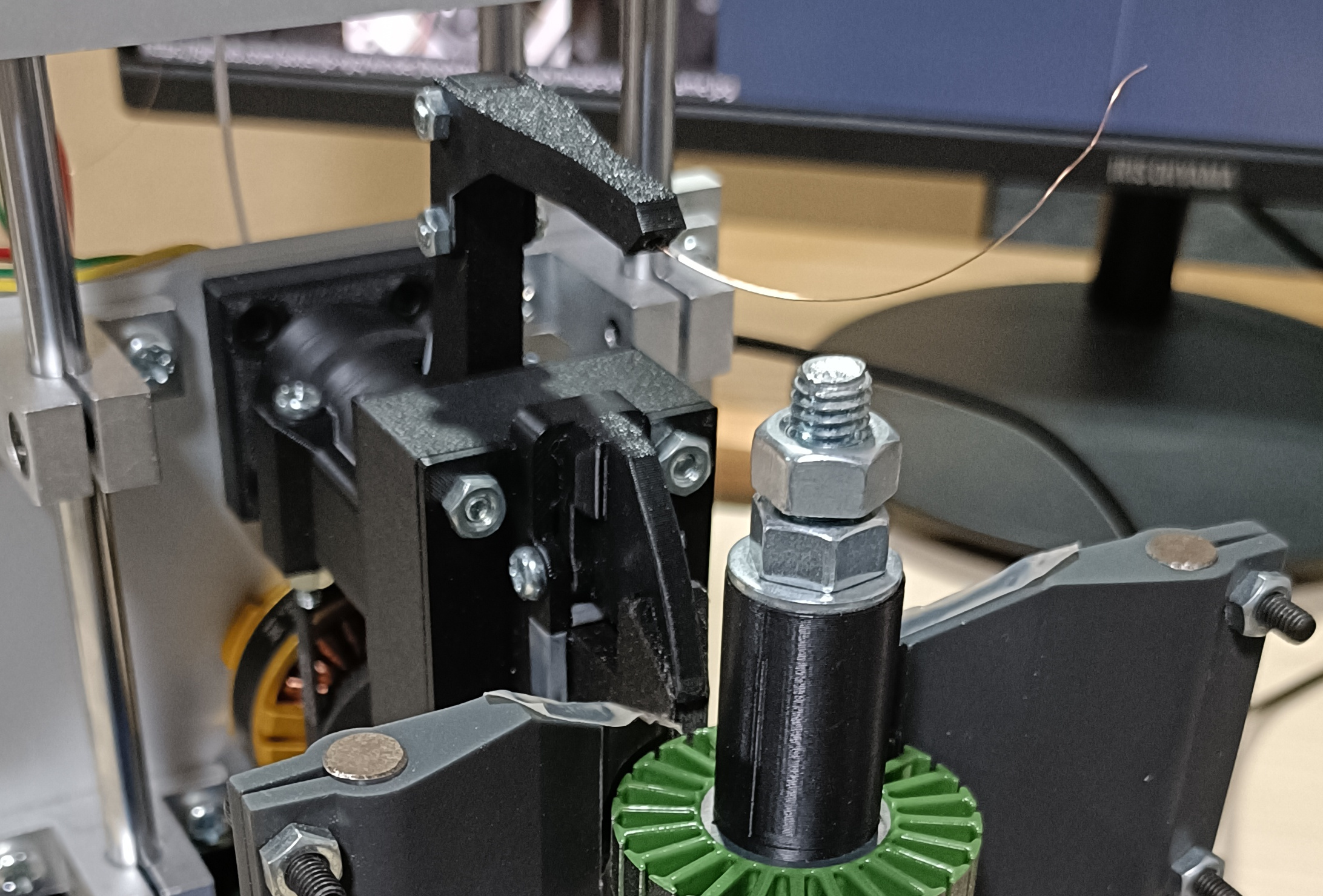
M0 校准
wind_range_end
-
将 M1 电机移动到
zero位置。 -
将 M0 电机移动到如下图所示位置:定子支架刚好接触第一个齿位尖端,并将其设置为
settings.yml中 M0 的wind_range_end。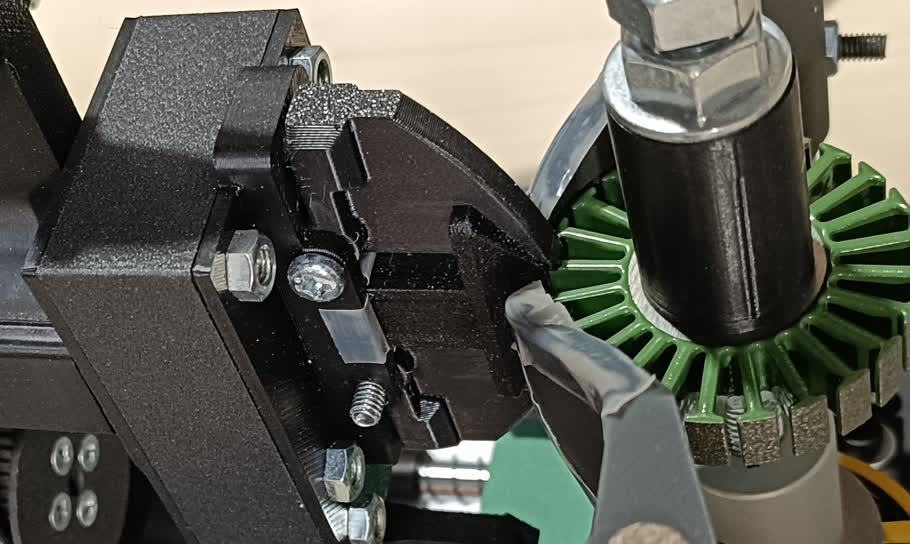
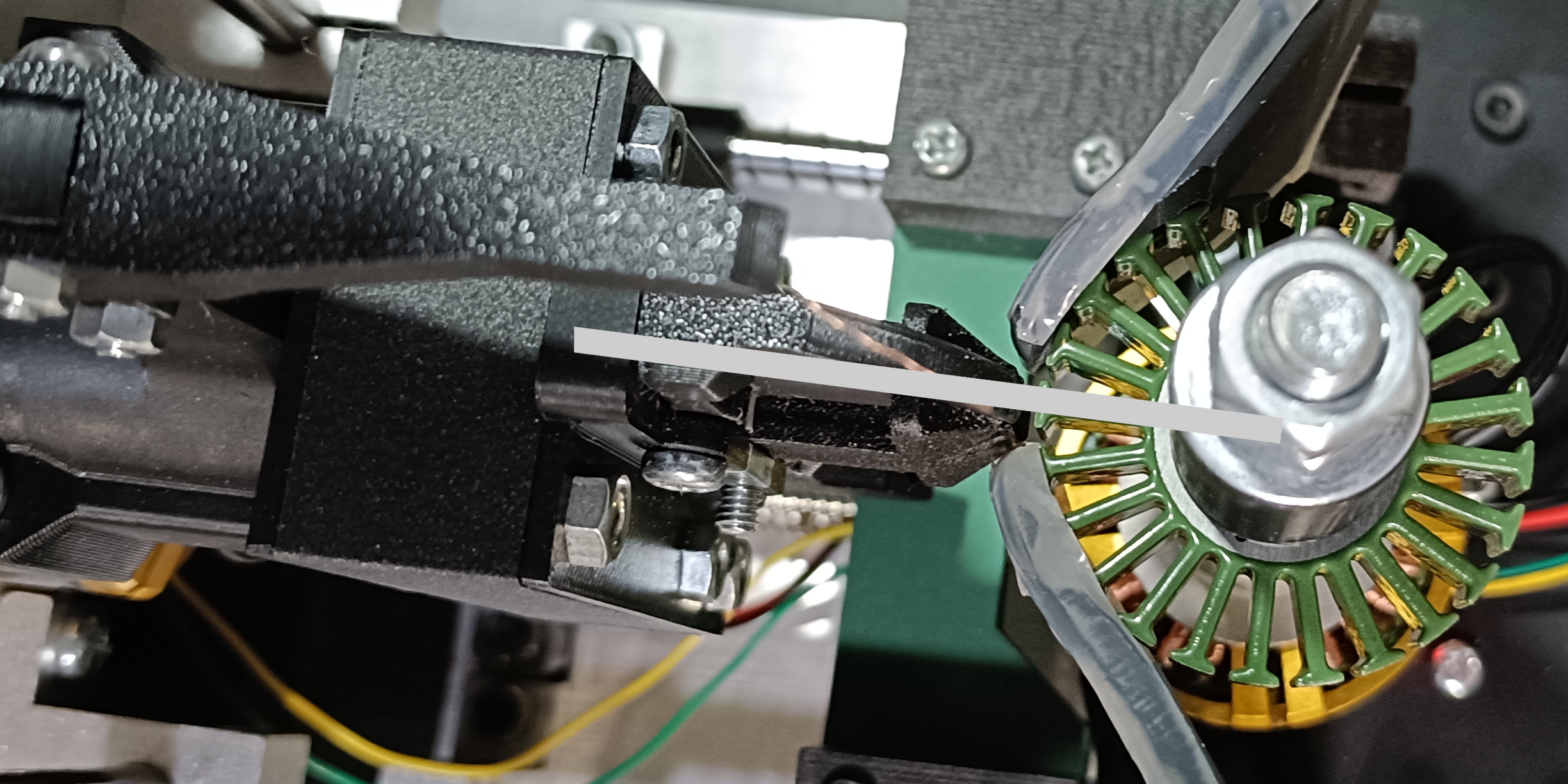
wind_range_start
-
继续移动 M0 到如下图所示位��置,并将其设置为
settings.yml中 M0 的wind_range_start。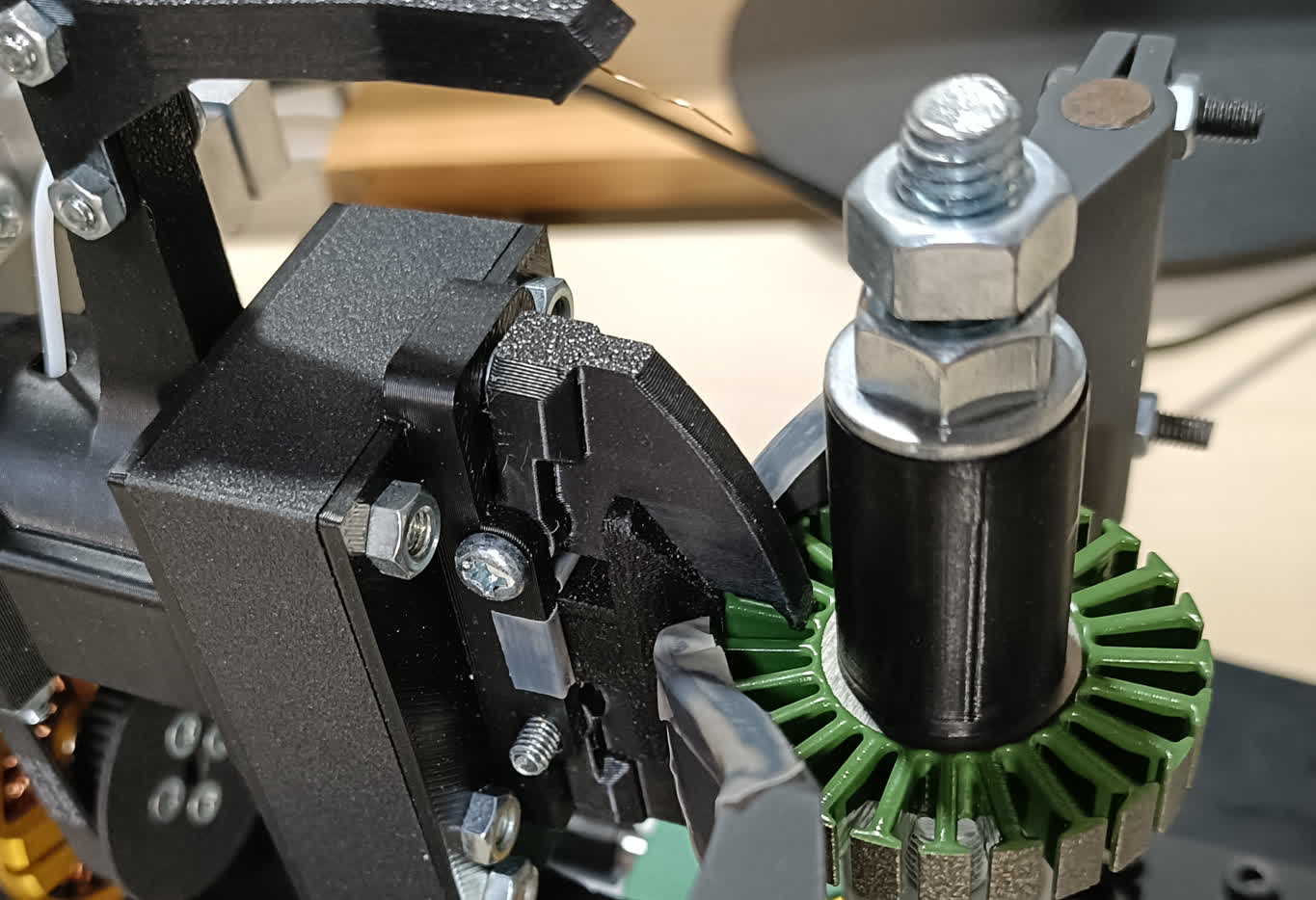
修改绕线配置
turns
在 settings.yml 中将匝数设置为 turns。
winding_config
将 winding_config 修改为与你电机匹配的绕组配置。有关绕组配置的更多信息,请参阅 Winding Configuration。
运行绕线脚本
-
校准完成后,运行绕线脚本:
python scripts/main.py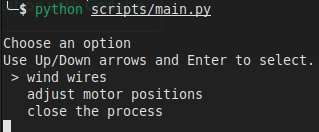
-
选择
adjust motor positions->Initialize the motor positions,将电机移动到起��始位置。 -
返回主菜单,选择
wire wires->wind wire 0开始绕线。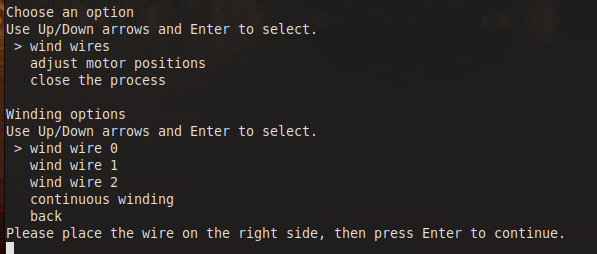
-
按提示拧紧上方螺母并固定导线。
如果提示 "Please place the wire on the right side...",请按下图放置导线并按 Enter。
如果提示 "Please place the wire on the left side...",请按下图放置导线并按 Enter。
-
按 Enter 开始绕线。机器会按照你设置的参数自动进行绕线。
