settings.yml
概要
settings.yml は Winder BLDC モーター巻線機の設定ファイルで、ルートディレクトリに配置します。
これらのパラメータは、対象モーターや巻線プロセスに応じて調整できます。
巻線機で scripts/calib.py を実行してパラメータをキャリブレーションできます。
serial
port
Aotenjo Master が接続されているシリアルポートです。デフォルトは /dev/ttyACM0 です。
baudrate
シリアル通信のボーレートです。デフォルトは 115200 です。
logging
level
アプリケーションのログレベルです。デフォルトは INFO です。
motor
M0
M0 はステーターの直線移動を制御するモーターです。
direction
M0 モーターの回転方向です。
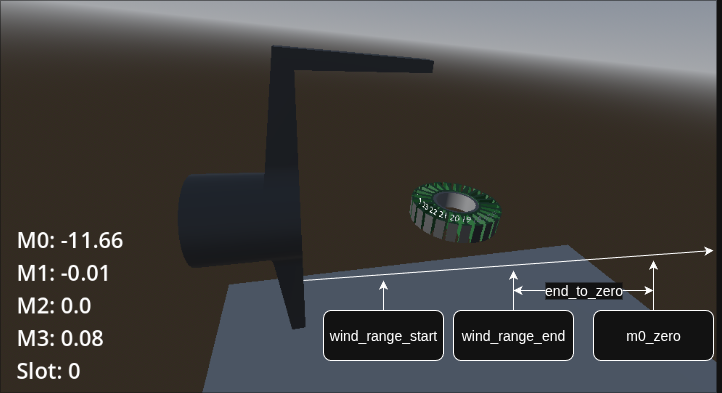
wind_range_end
アームがスロット端まで巻き進める位置です。
wind_range_start
アームがスロット根元から巻き始める位置です。
end_to_zero
M0 の wind_range_end と zero の距離です。
velocity
シミュレーションモードでの M0 の速度(rad/s)です。
M1
M1 はステーターを回転させるモーターです。
direction
M1 モーターの回転方向です。
zero
ステーターがステーターホルダーと完全に一致する M1 の位置です。
end_to_rotating_position
wind_range_end と M1 の回転位置の距離です。
velocity
シミュレーションモードでの M1 の速度(rad/s)です。
M2
M2 はステーターにワイヤーを巻き付けるモーターです。
direction
M2 モーターの回転方向です。
zero
アームが 12 時方向にあるときの M2 の位置です。
angle_to_prevent_collision
ステーターとワイヤーの衝突を防ぐ角度です。
velocity
シミュレーションモードでの M2 の速度(rad/s)です。
M2 はステーターにワイヤーを巻き付けるモーターです。
zero
アームが 12 時方向にあるときの M2 の位置です。
velocity
シミュレーションモードでの M2 の速度(rad/s)です。
M3
M3 はワイヤー張力を制御するモーターです。
direction
M3 モーターの回転方向です。
pull_wire_torque
ワイヤーを引くために M3 が加えるトルクです。
wind_torque
巻線中に M3 が加えるトルクです。
velocity
シミュレーションモードでの M3 の速度(rad/s)です。
winding
turns
1 スロットあたりの巻数です。デフォルトは 75 です。
starts_at
巻線を開始する最初のスロット番号です。デフォルトは 0 です。
winding_config
巻線構成文字列です。デフォルトは "AaAabBbBCcCcaAaABbBbcCcC" です。この文字列は 24n22p モーターの巻線順序を表します。
巻線構成の詳細は Winding Configuration を参照してください。
dont_move_m3
巻線中に M3 を動かすかどうかです。デフォルトは false です.