settings.yml
概要
settings.yml には、Winder BLDC モーター巻線機の構成が含まれており、ルート ディレクトリに配置されます。
これらのパラメータは、巻き上げられる特定のモーターと希望の巻き上げプロセスに基づいて調整できます。
ご自身のモーター巻線機で scripts/calib.py を実行すると、パラメータを調整できます。
serial
port
青天井マスターが接続されているシリアルポート。デフォルトは /dev/ttyACM0 です。
baudrate
シリアル通信のボーレート。デフォルトは 115200 です。
motor
M0
M0 はステーターの直線運動を制御するモーターです。
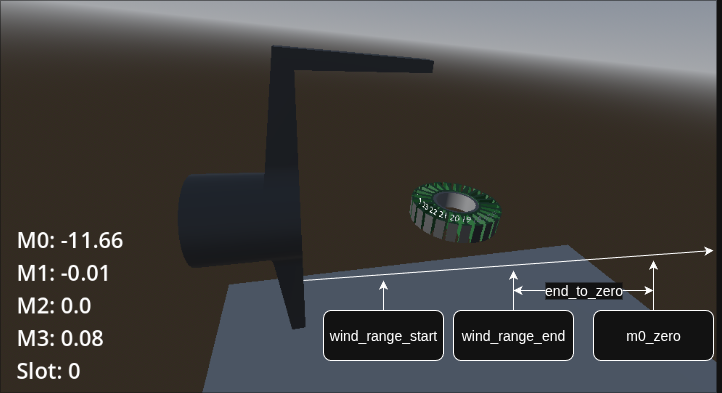
wind_range_end
アームがスロットの端まで巻き付く位置。
wind_range_start
スロットの根元からアームが巻き付く位置。
end_to_zero
M0 の wind_range_end と zero の間の距離。
velocity
シミュレーションモードにおけるM0の速度(rad/s)。
M1
M1はステータを回転させるモーターです。
zero
M1の位置はステーターホルダーと正確に一致しました。
end_to_rotating_position
wind_range_endからM1の回転位置までの距離。
velocity
シミュレーションモードにおけるM1の速度(rad/s)。
M2
M2はステーターにワイヤーを巻き付けるモーターです。
zero
腕を12時の位置にしたとき�のM2の位置。
angle_to_prevent_collision
ステーターとワイヤーの衝突を防ぐ角度。
velocity
シミュレーションモードにおけるM2の速度(rad/s)。
M2はステーターにワイヤーを巻き付けるモーターです。
zero
腕を12時の位置にしたときのM2の位置。
velocity
シミュレーションモードにおけるM2の速度(rad/s)。
M3
M3はワイヤーの張力を制御するモーターです。
pull_wire_torque
ワイヤを引っ張るために M3 によって加えられるトルク。
wind_torque
巻き取り時に M3 によって加えられるトルク。
velocity
シミュレーションモードにおけるM3の速度(rad/s)。
winding
turns_per_slot
スロットごとのターン数。デフォルトは 75 です。
starts_at
最初に巻くスロット番号。デフォルトは 0 です。
winding_config
ワインディング構成文字列。デフォルトは "AaAabBbBCcCcaAaABbBbcCcC" です。この文字列は、24n22p モーターの巻線シーケンスを表します。
巻線構成の詳細については、「巻線構成](./winding-config.mdx)」を参照してください。
dont_move_m3
巻き取り中にM3を動かすかどうか。デフォルトは false です。