settings.yml
概述
settings.yml 包含 Winder BLDC 电机绕线机的配置,并放置在根目录中。
这些参数可以根据所缠绕的特定电机和所需的缠绕工艺进行调整。
您可以通过在绕线机上运行 scripts/calib.py 来校准参数。
serial
port
Aotenjo Master 连接的串行端口。默认为/dev/ttyACM0。
baudrate
串行通信的波特率。默认为115200。
motor
M0
M0是控制定子直线运动的电机。
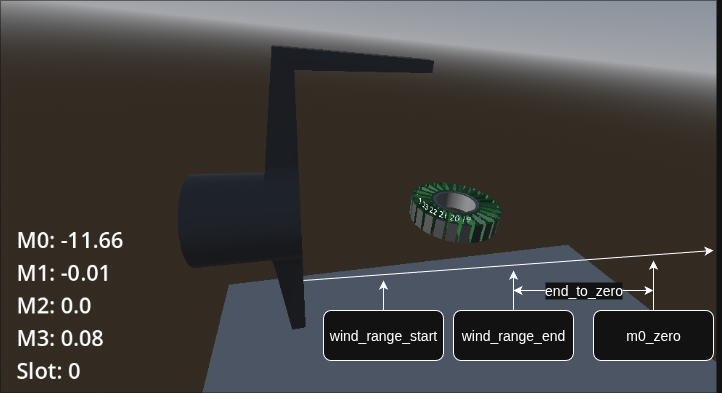
wind_range_end
臂缠绕到槽末端的位置。
wind_range_start
臂从槽根部缠绕的位置。
end_to_zero
M0 的wind_range_end 和zero 之间的距离。
velocity
模拟模式下M0的速度(rad/s)。
M1
M1是使定子旋转的电机。
zero
M1的位置与定子支架正好对齐。
end_to_rotating_position
wind_range_end与M1旋转位置之间的距离。
velocity
模拟模式下M1的速度(rad/s)。
M2
M2 是将电线缠绕在定子上的电机。
zero
当手臂位于12点钟位置时M2的位置。
angle_to_prevent_collision
防止定子与导线碰撞的角度。
velocity
模拟模式下M2的速度(rad/s)。
M2 是将电线缠绕在定子上的电机。
zero
当手臂位于12点钟位置时M2的位置。
velocity
模拟模式下M2的速度(rad/s)。
M3
M3是控制线张力的电机。
pull_wire_torque
M3拉动电线所施加的扭矩。
wind_torque
绕线时M3施加的扭矩。
velocity
模拟模式下M3的速度(rad/s)。
winding
turns_per_slot
每个槽的匝数。默认为75。
starts_at
要缠绕的第一个槽号。默认为0。
winding_config
缠绕配置字符串。默认为"AaAabBbBCcCcaAaABbBbcCcC"。该字符串代表 24n22p 电机的绕组顺序。
有关绕组配置的更多信息,请参阅绕组配置。
dont_move_m3
绕线时是否移动M3。默认为false。