CANFD通讯
在本教程中,我们将探讨如何通过 CAN FD 控制 Aotenjo One 板并运行闭环角度控制。
如果您还没有设置CAN FD,请参阅Aotenjo One CAN FD教程以获取详细的接线和配置说明。
如果 CAN 网络中的任何板卡是 Aotenjo One v1.x 或 Aotenjo Master v1.x,则无法使用 CAN FD 通信。请参考【CAN总线通讯教程](/docs/aotenjo-one/canbus)】。
有关CAN FD的更多信息,请参阅什么是CAN FD?。
先决条件
在本教程中,使用以下硬件:
- Aotenjo One Board 单片机:STM32G431CBU6 版本:Aotenjo One V2.0
- Aotenjo主板 单片机:STM32G431CBU6 版本:Aotenjo Master V2.1
- 径向磁化圆盘磁铁(Aotenjo One 附带)
- ST-LINK V2克隆
- BlackPill STM32 板
- BE4108 75T云台电机
- 电源(12V)
您需要 ST-LINK V2 克隆才能将固件上传到开发板。您可以以低于 5 美元的价格购买廉价的 ST-LINK V2 克隆版。
安装
VScode 与 PlatformIO
您可以从 VSCode 扩展市场安装 PlatformIO。
STM32CubeProgrammer
您需要它来将固件刷新到主板上。
克隆存储库
git clone https://github.com/aotenjo-xyz/master.git
cd master
快速入门
-
将 Aotenjo 主板连接到 ST-LINK V2 编程器。
 ST-LINK V2 <-> Aotenjo Master3.3V <---> 3.3VGND <---> GNDSWDIO <---> SWDIOSWCLK <---> SWCLKRST <---> NRST信息
ST-LINK V2 <-> Aotenjo Master3.3V <---> 3.3VGND <---> GNDSWDIO <---> SWDIOSWCLK <---> SWCLKRST <---> NRST信息
与blackpill板不同的是,对于STM32G4系列,您需要将NRST引脚连接到ST-LINK V2编程器。
或者,您可以在上传过程中按住Aotenjo主板上的NRST按钮来达到相同的效果。
:::
2. 将 ST-LINK V2 编程器连接到计算机。
3. 在 VSCode 中打开项目文件夹。
4. 单击左侧栏上的 PlatformIO 选项卡,然后单击 Upload 按钮将固件上传到开发板。

-
断开 ST-LINK V2 编程器,然后在 Aotenjo Master 和 Aotenjo One 板之间连接用于电源的 JST XH 电缆和用于 CAN 总线的 JST PH 电缆。
-
通过 USB 将 Aotenjo Master 板连接到计算机。
-
单击左侧边栏上�的 PlatformIO 选项卡,然后单击
Monitor按钮以打开串行监视器。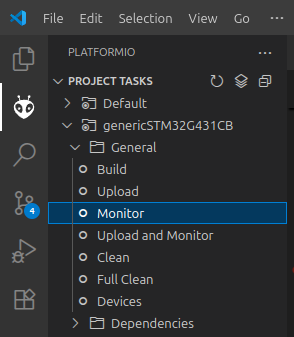
-
打开电源,电机开始旋转,初始化FOC(磁场定向控制)。
-
在串口监视器中输入以下命令并按回车键:
M06.28
M0 电机将完成一整圈并停止在初始位置。您可以通过更改弧度值来调整目标角度。
您还可以输入负值,例如M0-6.28,以相反方向旋转电机。
要读取 M0 电机的当前角度,请输入:
M0P
要将电机置于睡眠模式,请使用以下命令:
ESTOP
这正是我们使用 CAN 总线与 Aotenjo Master 和 Aotenjo One 板进行通信来控制绕线机的方式! 希望您喜欢使用 Aotenjo 构建您的项目!