Firmware
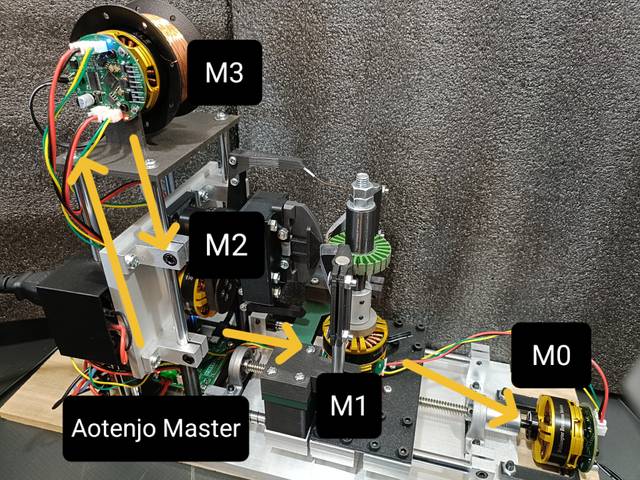
Winder uses four Aotenjo One motor controllers to control the four motors (M0, M1, M2, M3) and one Aotenjo Master as the CAN bus master to coordinate the motor controllers.
Installation
Install this repo
git clone https://github.com/aotenjo-xyz/one.git
Compatibility
The latest version is compatible with Aotenjo One v2.0 and later.
The latest version is not compatible with Aotenjo One v1.x.
If any board in the CAN network is an Aotenjo One v1.x or Aotenjo Master v1.x, all boards must run the v1.x firmware for compatibility.
In this case, even v2.x boards must be flashed with the v1.x firmware.
Upload Firmware
Each motor controller except M0 (M1, M2, M3) needs its own firmware from the examples folder in the one repository.
You also may need to adjust the PID settings depending on your motor.
Here’s the process:
For M1:
- Replace
src/main.cppandsrc/CANProfile.hwith the files fromexamples/M1/(Linux/macOS commands below)
rm src/*
cp examples/M1/main.cpp src/main.cpp
cp examples/M1/CANProfile.h src/CANProfile.h
-
Upload the firmware to the M1 controller.
-
Repeat the same steps for M2 and M3 using their corresponding example folders.
M0 uses the default src/main.cpp and src/CANProfile.h, so you don’t need to change anything for M0.