Winding Configuration
Different motor designs use different winding configurations. The most common types are:
- Star (Y) Winding
- Delta (Δ) Winding
Star (Y) Winding
In a Star (Y) configuration, one end of each phase coil is connected to a single common point (the star point).
The remaining three coil ends connect to the motor driver.
This configuration typically provides:
- Higher torque at low speeds
- Better efficiency at low RPM
- Smoother control for applications such as gimbals, robotic arms, and precision actuators
Because of its stability and torque characteristics, Star (Y) winding is widely used in low‑KV, high‑torque motors.
Delta (Δ) Winding
In a Delta (Δ) configuration, the three coils are connected end‑to‑end to form a closed triangular loop.
Each corner of the triangle connects to the motor driver.
This configuration offers:
- Higher achievable speed
- Lower phase resistance
- Better performance for high‑RPM applications such as drones and RC aircraft
Delta (Δ) winding is common in motors where speed and power density matter more than low‑speed torque.
For more about Star vs Delta winding, you can refer to this SimpleFOC docs: Motor types and winding configurations.
Also, the number of poles and slots in the motor will affect the winding configuration.
To determine the appropriate winding configuration for your motor, you can use tools like Winding Scheme Calculator.
The source code for this tool (named standalone) is available in the following RC Groups forum thread:
https://www.rcgroups.com/forums/showthread.php?4846685-bavaria-direct-going-off-line
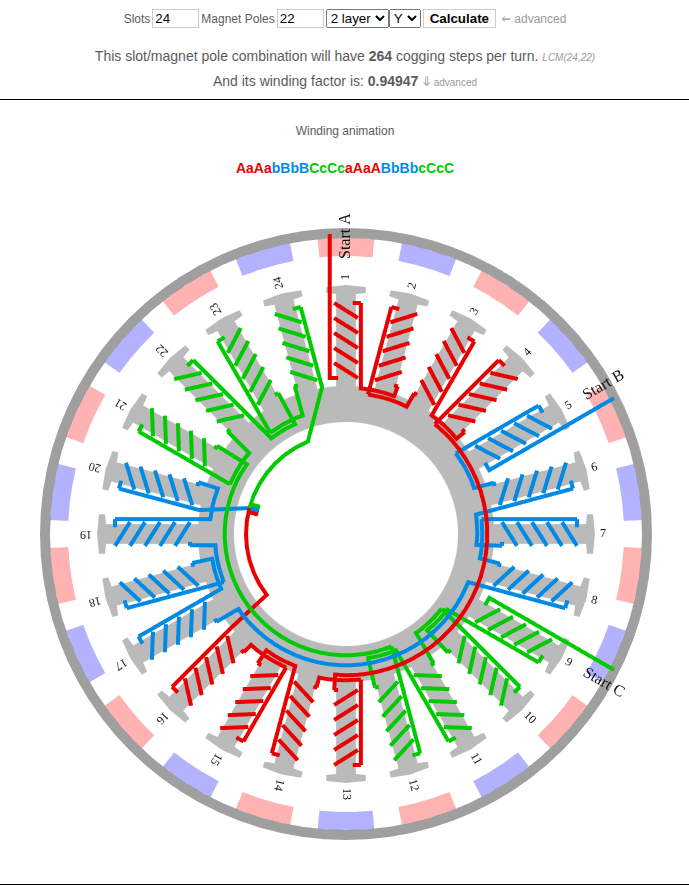
24n22p
AaAabBbBCcCcaAaABbBbcCcC
You can find the winding configuration for 24n22p motors below:
- BE4108
- GBM5208
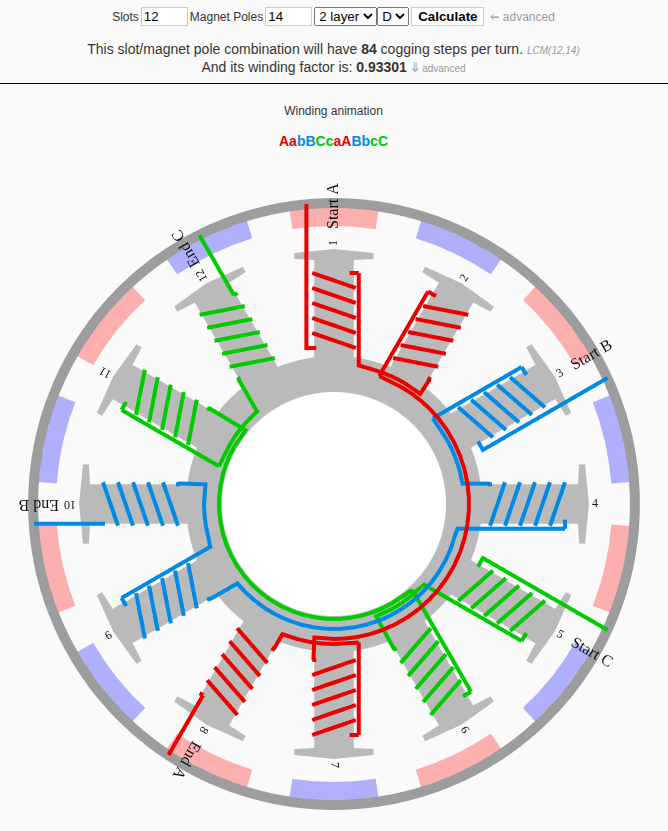
12n14p
AabBCcaABbcC
You can find the winding configuration for 12n14p motors below:
- A2212
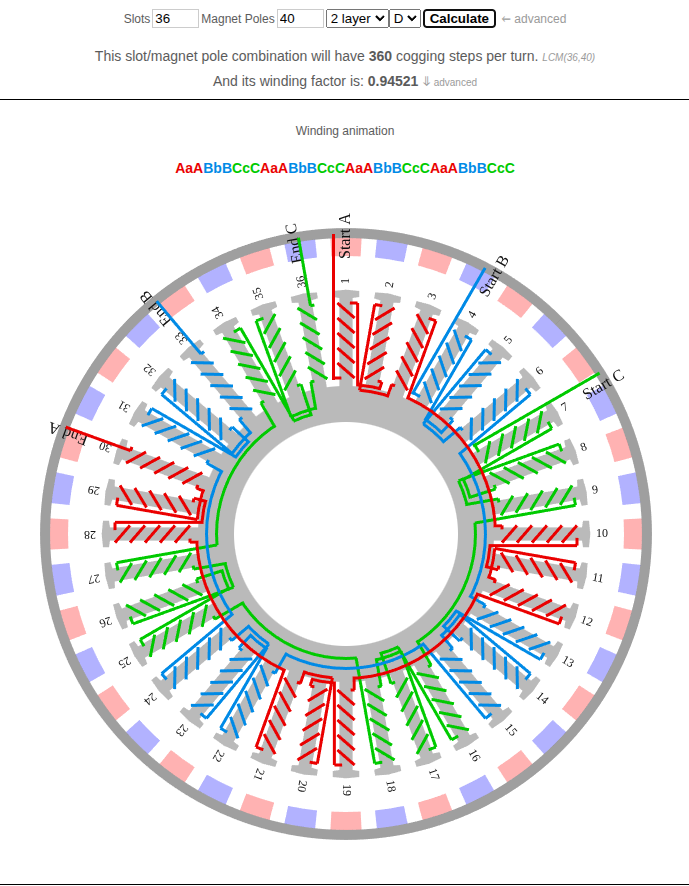
36n40p
AaABbBCcCAaABbBCcCAaABbBCcCAaABbBCcC
You can find the winding configuration for 36n40p motors below:
- Eaglepower LA8308
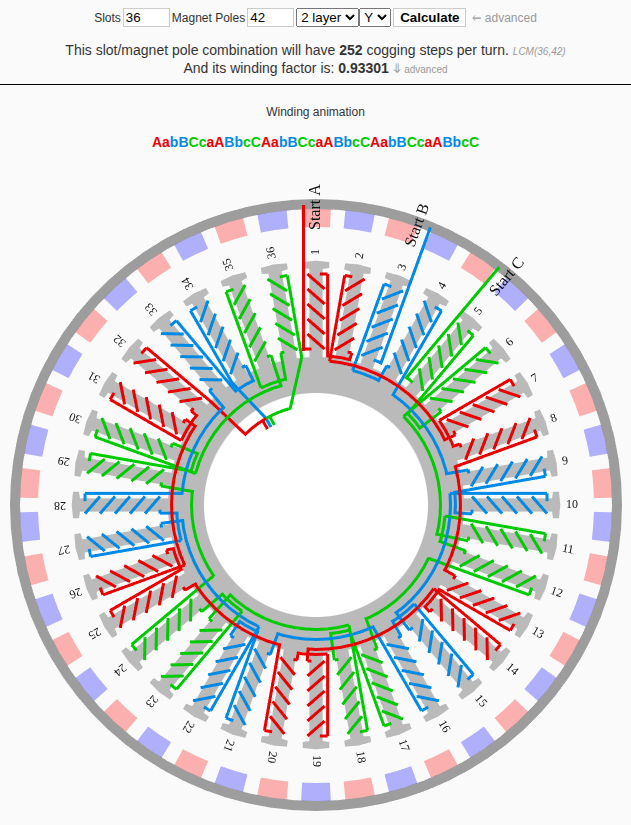
36n42p
AabBCcaABbcCAabBCcaABbcCAabBCcaABbcC